pagine varie
compilatore
laboratorio
elettricità
Processing
Arduino
logggin
roboDade
introduzione
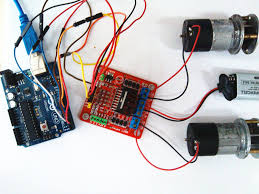
Per muovere un motore occorre una scheda apposita. Noi abbiamo utilizzato la economica Keyes L298N. In genere tali schede hanno 3 input per ciascun motore, da collegare ai pin di Arduino. Per 2 motori 6 pin.
| PIN scheda | funzione | avanti | indietro | a sinistra | a destra | ferma |
| ENA | motore A abilita | HIGH | HIGH | HIGH | HIGH | LOW |
| IN1 | motore A avanti | HIGH | LOW | HIGH | LOW | |
| IN2 | motore A indietro | LOW | HIGH | LOW | HIGH | |
| | | | | | |
| ENB | motore B abilita | HIGH | HIGH | HIGH | HIGH | LOW |
| IN3 | motore B avanti | HIGH | LOW | LOW | HIGH | |
| IN4 | motore B indietro | LOW | HIGH | HIGH | LOW | |
Qui abbiamo aggiunto due led bicolore per gli occhi. Per ogni tasto del telecomando una variabile col suo codice per chiarezza.
Per brevità utilizziamo qualche funzione personalizzata
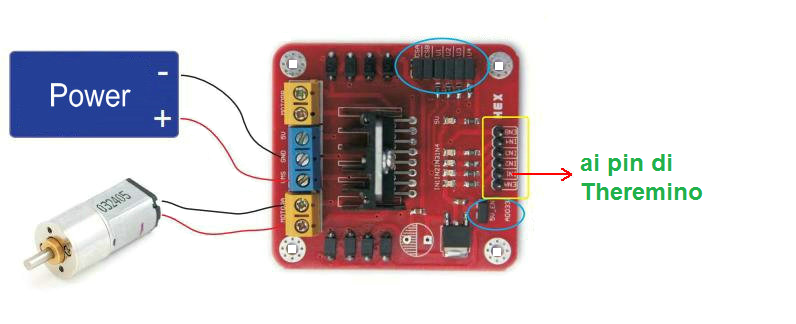
Scheda driver motori Keyes L298N
http://www.plexishop.it/it/scheda-driver-motori-keyes-l298n.html
Scheda driver con L298n per comandare un motore passo passo o due motori DC
La scheda è un ponte H e include anche i diodi di ricircolo.
Alimentazione:5Vdc per la logica
Tensione 5/35Vdc per potenza motore
Corrente D'uscita 2A su ogni canale.
Dimensione scheda 55x60 mm
algoritmo
attrezzaggio
variabili
ciclo
programma
codice Arduino
collegamenti elettrici









 logout
logout 